#OpenClaw
双智能体协作,告别单点故障时代
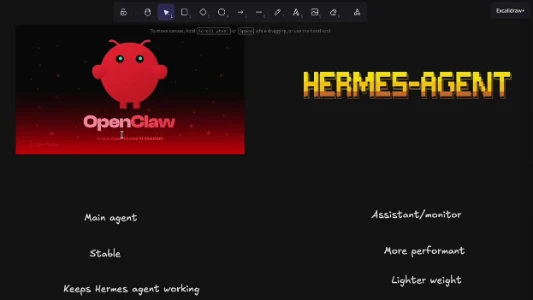
AI 博主 Alex Finn 演示了 OpenClaw 与 Hermes 的多智能体搭配方案,通过“主力规划 + 助手执行”的分工模式,实现成本与效率的最优解。该架构利用高性能模型负责复杂任务,轻量模型承担监控巡检,配合共享记忆机制,不仅将故障恢复时间从小时级压缩至秒级,还能避免重复踩坑。这种消除单点故障、按需分配任务的思路,适用于各类开发场景及多智能体协作系统。

微软正在开发另一个 OpenClaw 类智能体
微软正测试将开源本地智能体 OpenClaw 的核心功能整合至 Microsoft 365 Copilot 平台,面向企业客户强化安全控制。新产品定位为“持续运行”版 Copilot ,能随时执行跨长时间周期的多步骤任务,计划于 6 月 Microsoft Build 大会亮相。此举标志着微软智能体产品线从云端向本地延伸,与已发布的 Copilot Cowork 、 Copilot Tasks 形成互补。分析认为,本地化运行不仅关乎安全,更意味着更低延迟和更强离线能力,但如何在隐私风险与用户体验间取得平衡将是关键挑战。

Anthropic 临时封禁 OpenClaw 创建者访问 Claude
OpenClaw 创始人斯坦伯格的 Anthropic 账户于 4 月 10 日被暂停后恢复据悉与 Anthropic 对第三方工具的收费政策调整有关。 Anthropic 宣布 Claude 订阅不再覆盖 OpenClaw 等工具的使用量,斯坦伯格将此称为“爪子税”。他暗指 Anthropic 存在“抄功能”嫌疑,并强调自己在 OpenClaw 与 OpenAI 的职责分离。此事件反映出 AI 平台与开发者之间日益紧张的利益博弈关系。
【AI教程】本地还是云端?部署 OpenClaw 的 4 种方式
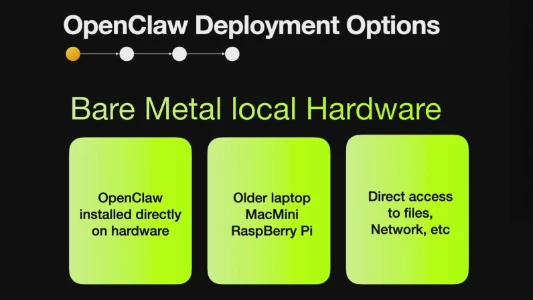
OpenClaw 部署方式多样,AI 科普达人 New Machina 梳理了本地裸机、Docker 沙盒、云端 VPS 及托管服务四种方案。核心矛盾在于:本地运行能解锁读取文件与脚本等超能力,但安全风险最高;云端虽安全却阉割了核心价值。选择本质是风险偏好问题,新手可选更安全的云端或 Docker,极客可尝试裸机,而追求能力与安全平衡的用户,Docker 沙盒或许是当下最佳折中方案。